



Cos’è la fotocamera RGB-D?
Riepilogo dell’articolo
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Cosa significa RGBD sulla fotocameraRGB-D si riferisce generalmente a dati di profondità rossi, verdi, blu più catturati dai sensori RGB-D. Un’immagine RGB-D fornisce informazioni di profondità per pixel allineate ai pixel di immagine corrispondenti.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la differenza tra la fotocamera RGB-D e il lidarAbstract: le telecamere Lidar e RGB sono sensori comunemente usati nei veicoli autonomi. Tuttavia, entrambi hanno limiti: Lidar fornisce una profondità accurata ma è scarso nella risoluzione verticale e orizzontale; Le immagini RGB forniscono una trama densa ma mancano di informazioni di profondità.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quanto è accurata la fotocamera RGB-DLa precisione di entrambi i sistemi era di circa 1.00, che è clinicamente accettabile.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quanto costa le telecamere RGB-DSensori RGB-D del consumatore
Tuttavia, questi sensori costano circa $ 10.000 ciascuno. Al contrario, i nuovi sensori RGB-D del consumatore costano meno di $ 200. La tecnologia di rilevamento della profondità per pixel utilizzata nelle telecamere RGB-D dei consumatori è stata sviluppata da PrimeSense (http: // www.primese.com/en/tecnologia/115-the-primese-3d-sensing-solution).
Cachedsimilar
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono gli svantaggi della fotocamera RGB-DCome accennato in precedenza, la telecamera RGB-D non riesce a catturare oggetti e superfici realizzati con materiali trasparenti, riflettenti e assorbenti. Inoltre, quando vengono utilizzate almeno due telecamere per visualizzare la stessa scena, il problema dell’interferenza riduce la qualità della mappa di profondità stimata.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono i vantaggi delle telecamere RGBDL’aggiunta di dati RGB a una nuvola di punti o una mappa di profondità di una fotocamera di rilevamento di profondità 3D consente di individuare gli oggetti in modo più efficace per il riconoscimento o il rilevamento dei pattern. Ciò è particolarmente utile nelle applicazioni che devono identificare il tipo e la natura degli oggetti nella scena insieme a misurare la profondità ad essi.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Che è meglio lidar o telecamereTelecamere Lidar vs
Tuttavia, la differenza fondamentale tra la tecnologia Lidar e fotocamera è che Lidar emette la luce che vede, mentre le telecamere non lo fanno. Ciò dà a Lidar la capacità di calcolare distanze incredibilmente accurate a molti oggetti che vengono rilevati contemporaneamente.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono gli svantaggi della fotocamera RGB-DCome accennato in precedenza, la telecamera RGB-D non riesce a catturare oggetti e superfici realizzati con materiali trasparenti, riflettenti e assorbenti. Inoltre, quando vengono utilizzate almeno due telecamere per visualizzare la stessa scena, il problema dell’interferenza riduce la qualità della mappa di profondità stimata.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la differenza tra RGB e RGB-DUn’immagine RGB-D è semplicemente una combinazione di un’immagine RGB e la sua corrispondente immagine di profondità. Un’immagine di profondità è un canale di immagine in cui ogni pixel si riferisce a una distanza tra il piano dell’immagine e l’oggetto corrispondente nell’immagine RGB.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono gli svantaggi della fotocamera RGB DCome accennato in precedenza, la telecamera RGB-D non riesce a catturare oggetti e superfici realizzati con materiali trasparenti, riflettenti e assorbenti. Inoltre, quando vengono utilizzate almeno due telecamere per visualizzare la stessa scena, il problema dell’interferenza riduce la qualità della mappa di profondità stimata.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la fotocamera RGB più piccolaIl più piccolo sensore di immagine disponibile in commercio è l’OV6948, che misura 0.575 mm x 0.575 mm x 0.232 mm, realizzato da Omnivision Technologies, Inc. (STATI UNITI D’AMERICA). Il record si basa sui test del prodotto e MAR.
[/WPREMARK>
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Cosa significa RGBD sulla fotocamera
RGB-D si riferisce generalmente a dati di profondità rossi, verdi, blu più catturati dai sensori RGB-D. Un’immagine RGB-D fornisce informazioni di profondità per pixel allineate ai pixel di immagine corrispondenti.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la differenza tra la fotocamera RGB-D e il lidar
Abstract: le telecamere Lidar e RGB sono sensori comunemente usati nei veicoli autonomi. Tuttavia, entrambi hanno limiti: Lidar fornisce una profondità accurata ma è scarso nella risoluzione verticale e orizzontale; Le immagini RGB forniscono una trama densa ma mancano di informazioni di profondità.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quanto è accurata la fotocamera RGB-D
La precisione di entrambi i sistemi era di circa 1.00, che è clinicamente accettabile.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quanto costa le telecamere RGB-D
Sensori RGB-D del consumatore
Tuttavia, questi sensori costano circa $ 10.000 ciascuno. Al contrario, i nuovi sensori RGB-D del consumatore costano meno di $ 200. La tecnologia di rilevamento della profondità per pixel utilizzata nelle telecamere RGB-D dei consumatori è stata sviluppata da PrimeSense (http: // www.primese.com/en/tecnologia/115-the-primese-3d-sensing-solution).
Cachedsimilar
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono gli svantaggi della fotocamera RGB-D
Come accennato in precedenza, la telecamera RGB-D non riesce a catturare oggetti e superfici realizzati con materiali trasparenti, riflettenti e assorbenti. Inoltre, quando vengono utilizzate almeno due telecamere per visualizzare la stessa scena, il problema dell’interferenza riduce la qualità della mappa di profondità stimata.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono i vantaggi delle telecamere RGBD
L’aggiunta di dati RGB a una nuvola di punti o una mappa di profondità di una fotocamera di rilevamento di profondità 3D consente di individuare gli oggetti in modo più efficace per il riconoscimento o il rilevamento dei pattern. Ciò è particolarmente utile nelle applicazioni che devono identificare il tipo e la natura degli oggetti nella scena insieme a misurare la profondità ad essi.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Che è meglio lidar o telecamere
Telecamere Lidar vs
Tuttavia, la differenza fondamentale tra la tecnologia Lidar e fotocamera è che Lidar emette la luce che vede, mentre le telecamere non lo fanno. Ciò dà a Lidar la capacità di calcolare distanze incredibilmente accurate a molti oggetti che vengono rilevati contemporaneamente.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono gli svantaggi della fotocamera RGB-D
Come accennato in precedenza, la telecamera RGB-D non riesce a catturare oggetti e superfici realizzati con materiali trasparenti, riflettenti e assorbenti. Inoltre, quando vengono utilizzate almeno due telecamere per visualizzare la stessa scena, il problema dell’interferenza riduce la qualità della mappa di profondità stimata.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la differenza tra RGB e RGB-D
Un’immagine RGB-D è semplicemente una combinazione di un’immagine RGB e la sua corrispondente immagine di profondità. Un’immagine di profondità è un canale di immagine in cui ogni pixel si riferisce a una distanza tra il piano dell’immagine e l’oggetto corrispondente nell’immagine RGB.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono gli svantaggi della fotocamera RGB D
Come accennato in precedenza, la telecamera RGB-D non riesce a catturare oggetti e superfici realizzati con materiali trasparenti, riflettenti e assorbenti. Inoltre, quando vengono utilizzate almeno due telecamere per visualizzare la stessa scena, il problema dell’interferenza riduce la qualità della mappa di profondità stimata.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la fotocamera RGB più piccola
Il più piccolo sensore di immagine disponibile in commercio è l’OV6948, che misura 0.575 mm x 0.575 mm x 0.232 mm, realizzato da Omnivision Technologies, Inc. (STATI UNITI D’AMERICA). Il record si basa su test del prodotto e ricerche di mercato condotte da ricerche di mercato di trasparenza a Pune, in India, il 10 aprile 2019.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] RGB è buono per gli occhi
La risposta è no. Non c’è niente di speciale nell’illuminazione RGB e nell’illuminazione a LED, la luce è la luce e fintanto che l’intensità della luce visibile è entro limiti sicuri, non danneggerà gli occhi di nessuno. Semmai, le luci RGB sono come luci a LED in quanto sono più sicure perché non producono luce UV.
[/WPREMARK]
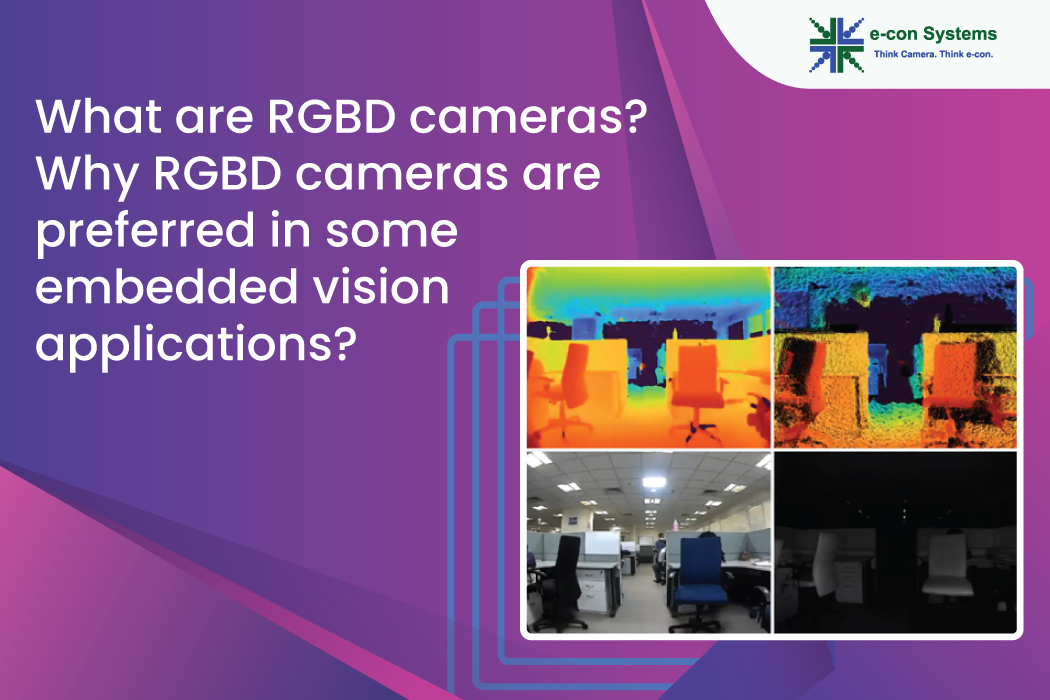
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la differenza tra la fotocamera di profondità e la fotocamera RGB
Le informazioni di profondità sono recuperabili attraverso una mappa/immagine di profondità creata da un sensore di profondità 3D come un sensore stereo o un tempo del sensore di volo. Le telecamere RGBD sono in grado di eseguire una fusione pixel-to-pixel di dati RGB e informazioni di profondità per fornire entrambi in un singolo frame.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Come funziona il sensore RGBD
I sensori RGB-D sono un tipo specifico di dispositivi di rilevamento della profondità che funzionano in associazione con una fotocamera del sensore RGB (rosso, verde e blu). Sono in grado di aumentare l’immagine convenzionale con informazioni di profondità (relative alla distanza dal sensore) in base al pixel.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è il rovescio della medaglia di Lidar
Un altro svantaggio dell’utilizzo dei dati LIDAR per l’analisi del terreno è la difficoltà e l’incertezza dell’interpretazione e dell’analisi dei dati. I dati LIDAR possono fornire informazioni ricche e dettagliate sul terreno, ma possono anche essere ambigui e complessi da interpretare e analizzare.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono gli svantaggi della fotocamera LIDAR
– Limitazioni del drone Lidarmuch Investimenti più ampi nelle attrezzature (rispetto ad altre tecnologie), quindi sebbene economico se usato su grandi scale, può essere costoso per l’acquisizione di dati in aree più piccole.La precisione dipende fortemente dalla qualità e dalla calibrazione dei componenti scanner, IMU e GNSS del sistema.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Cos’è il sensore Argb D
I sensori RGB-D sono un tipo specifico di dispositivi di rilevamento della profondità che funzionano in associazione con una fotocamera del sensore RGB (rosso, verde e blu). Sono in grado di aumentare l’immagine convenzionale con informazioni di profondità (relative alla distanza dal sensore) in base al pixel.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la differenza tra RGB e RGB D
Un’immagine RGB-D è semplicemente una combinazione di un’immagine RGB e la sua corrispondente immagine di profondità. Un’immagine di profondità è un canale di immagine in cui ogni pixel si riferisce a una distanza tra il piano dell’immagine e l’oggetto corrispondente nell’immagine RGB. Puoi usare Kinect per catturare tali immagini RGB-D.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la qualità della fotocamera più bassa
256×256 – Trovato su telecamere molto economiche, questa risoluzione è così bassa che la qualità dell’immagine è quasi sempre inaccettabile. Questo è 65.000 pixel totali. 640×480 – Questa è la fascia bassa di più "vero" macchine fotografiche. Questa risoluzione è ideale per e-mail di immagini o pubblicare immagini su un sito Web.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la fotocamera più semplice del mondo
Incontra il puck Solariccan – La fotocamera più semplice del mondo.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Quali sono i contro di RGB
RGB consllò lo standard del settore – più comune nel web design che nella stampa.Non tutti lavoreranno con le immagini RGB.Si basa un po ‘sulla luce, che la stampa non fornisce come fa un monitor di computer.Potrebbe essere un leggero spostamento del colore dallo schermo a stampa.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la migliore impostazione RGB per gli occhi
Normalmente, vuoi avere un contrasto di 1: 1000. Il punto più luminoso emetterà 1000 volte più luce del punto più buio. Va bene perché maggiore è il contrasto, più è impegnativo per i tuoi occhi.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Qual è la differenza tra immagine RGB e immagine di profondità
Un’immagine RGB-D è semplicemente una combinazione di un’immagine RGB e la sua corrispondente immagine di profondità. Un’immagine di profondità è un canale di immagine in cui ogni pixel si riferisce a una distanza tra il piano dell’immagine e l’oggetto corrispondente nell’immagine RGB.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Perché Elon Musk contro Lidar
Il primo è che è molto costoso. Il secondo, d’altra parte, è quasi filosofico. Lo stesso Musk ha spiegato che “i lidari montati sull’auto significa riempirlo con costose appendici. Ma su un’auto ogni accessorio aggiunto è una brutta cosa: è ridicolo riempire l’auto con questi dispositivi.
[/WPREMARK]
[wppremark_icon icon = “quote-left-2-solid” width = ” 32 “altezza =” 32 “] Perché Tesla ha smesso di usare Lidar
Ha anche detto che qualsiasi azienda che si affida a questo tipo di tecnologia è condannata. Sostiene che Lidar è troppo costoso e che mappare il mondo e mantenerlo aggiornato è troppo costoso. Invece, Tesla si concentra sui sistemi basati sulla visione, che crede siano più efficaci ed efficienti.
[/WPREMARK]